 |
Microburst, Windshear, Gust Front, and Vortex Detection in Mega Airport Using a Single Coherent Doppler Wind Lidar
Abstract:
Accurate wind shear detection is crucial for aviation safety, especially in landing and departure. A new approach for windshear alerting is proposed and demonstrated. This approach monitors orthogonal wind components in multiple runways using single coherent Doppler wind lidar (CDWL). First, the two orthogonal components of the wind field are retrieved from radial speed by an updated variational method. Then, the heading wind and cross wind on different runways are calculated simultaneously, without the location restriction of the single lidar. Finally, a windshear alerting message is generated through quantitatively evaluating the distribution of shear ramps over the monitoring area. The new CDWL-based approach for windshear alerting is implemented at the Beijing Daxing International Airport. The retrieved horizontal wind from the lidar is consistent with that from anemometers. Thanks to its high spatial/temporal resolution, some meteorological phenomena of aviation hazards, including microburst, windshear, gust front, and vortex are well captured. Particularly, all 10 windshear cases reported by crews are successfully identified during the windshear verification experiment, demonstrating the effectiveness and robustness of the new approach.
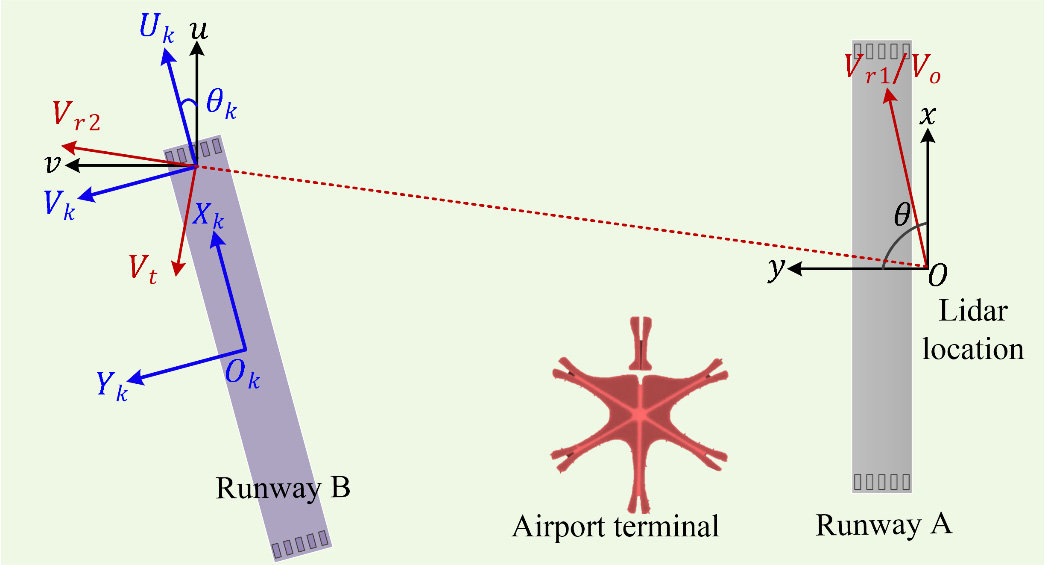
Fig.Diagrams of coordinates and velocities.
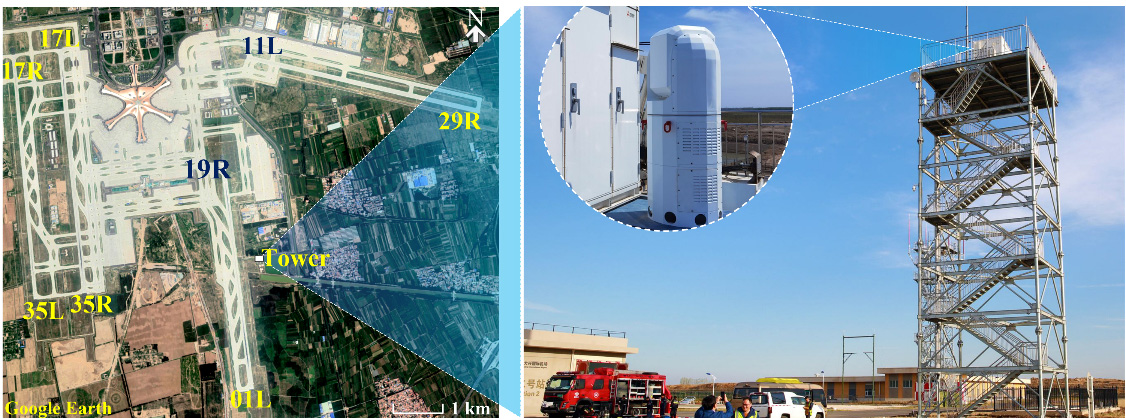
Fig. 2. (a) The location of the CDWL at BDIA, (b) Photograph of the CDWL (a) Time-tofrequency conversion function derived from the temporal and the spectral interferograms. (b) Femtosecond pulses before the dispersion. (c) Femtosecond pulses after the dispersion. To avoid pulse overlap, an offset perpendicular to the time-to-frequency conversion function is introduced between the Dopper-shifted pulse and the static pulse. One should also note that, generally, Doppler shift is very small relative to the optical bandwidth. For clarity, the Doppler shift is magnified in (b) and (c).
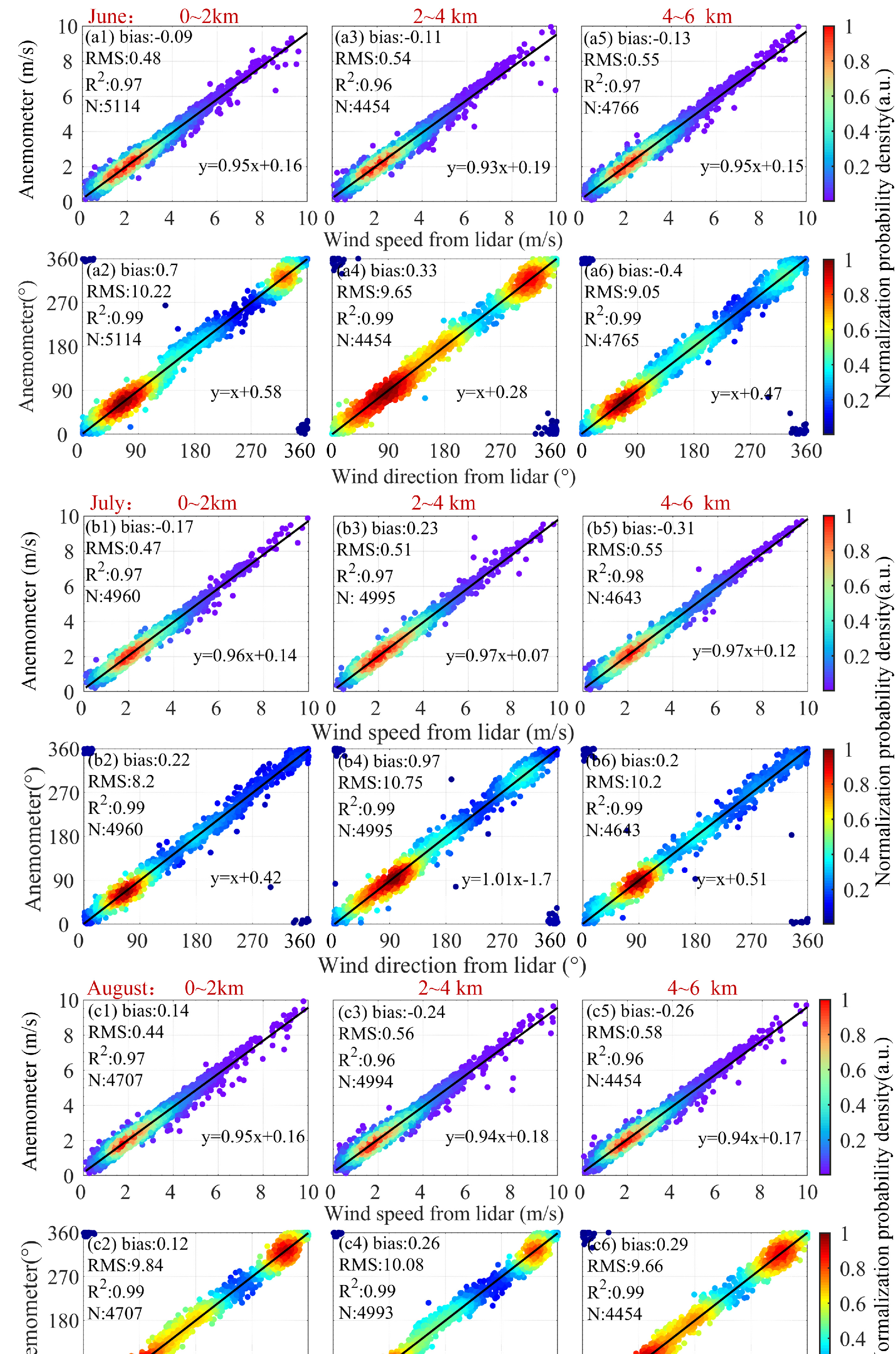
Fig. 3.. Comparison results of wind speed and direction measured by anemometers and retrieved from the CDWL. (a1–a6), (b1–b6) and (c1–c6) shows the comparison result of June, July, and August, respectively. The detail linear fitting results are also given in the figure. The color of each points represents the normalization probability density using the kernel density estimation. Positions of anemometers are marked in the head of each group of diagrams in red font.
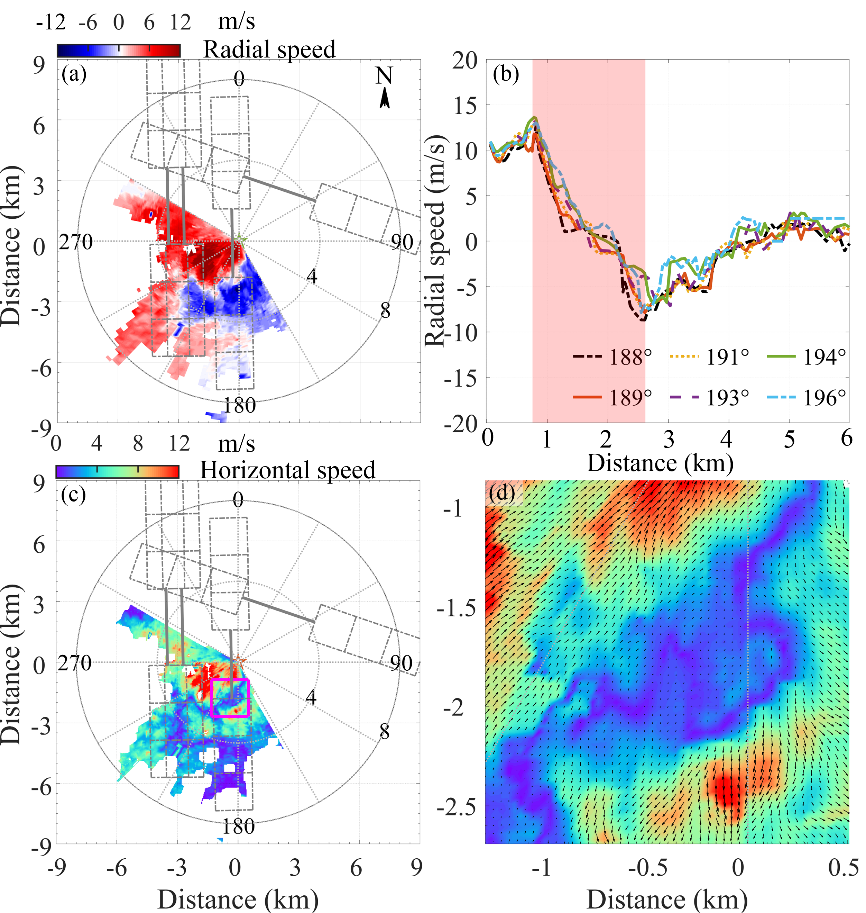
Fig. 4.Microburst results detected by the CDWL on 28 April, 15:54:12–15:54:42 (UTC). (a,b) radial speed, (c) horizontal speed. The pink rectangle means the area most affected by microburst. The detail structure of horizontal speed in pink rectangle in (c) is shown in (d). The sign of radial speed is defined as positive when the movement is toward the lidar, and vice versa.
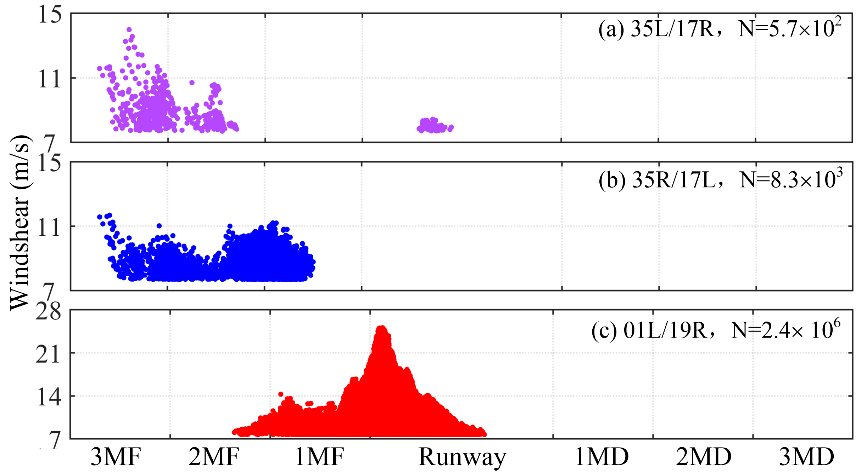
Fig. 5.Windshear center distribution on the runway due to the microburst, on 28 April, 15:54:12– 15:54:42 (UTC). (a) 35L/17R, (b) 35R/17L, (c) 01L/19R. N is the number of windshear ramps that exceed 7 m/s. 3MF, 2MF, and 1MF in the X axis mean the three monitor subareas in the landing sides, while 3MD, 2MD, and 1MD mean the monitor subareas in the departure sides.
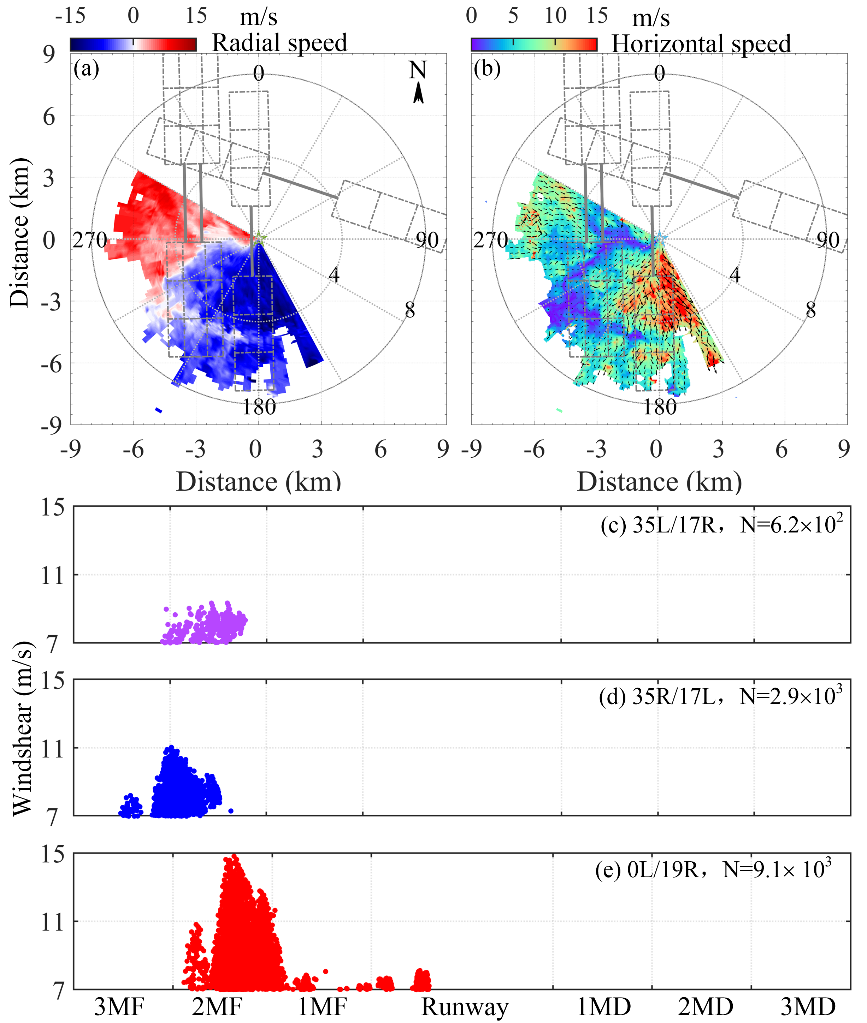
Fig. 6.The windshear event detected by the CDWL on May 6, 05:49:47–05:50:19 (UTC). (a) Radial speed, (b) horizontal speed and wind vector, (c–e) windshear ramps center distribution of 35L/17R, 35R/17L, 01L/19R. N is the number of windshear ramps that exceed 7 m/s.
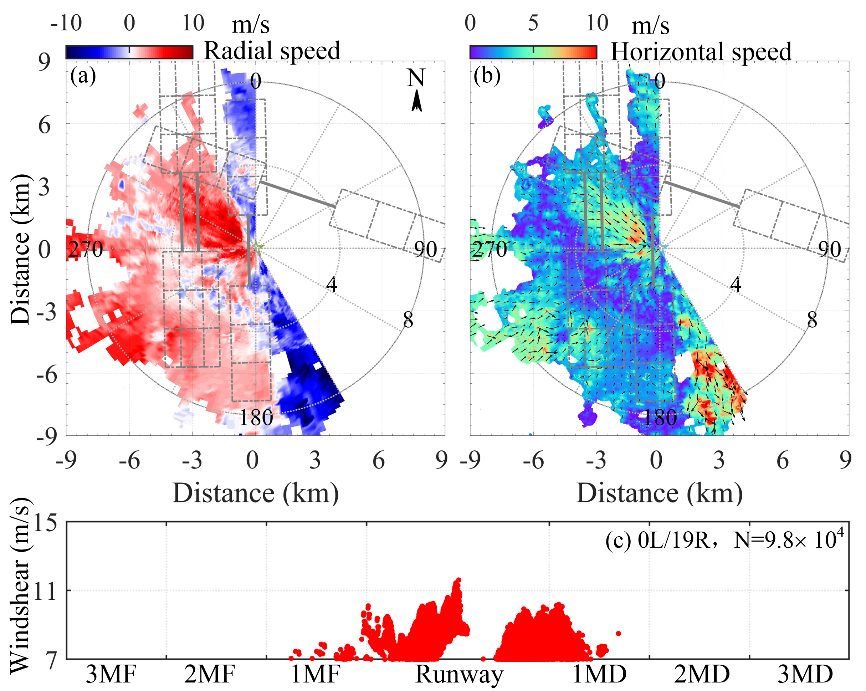
Fig. 7.The windshear event detected by the CDWL on May 26, 10:33:38–10:34:21 (UTC). (a) Radial speed, (b) horizontal speed and wind vector, (c) windshear ramps center distribution. N is the number of windshear ramps that exceed 7 m/s.
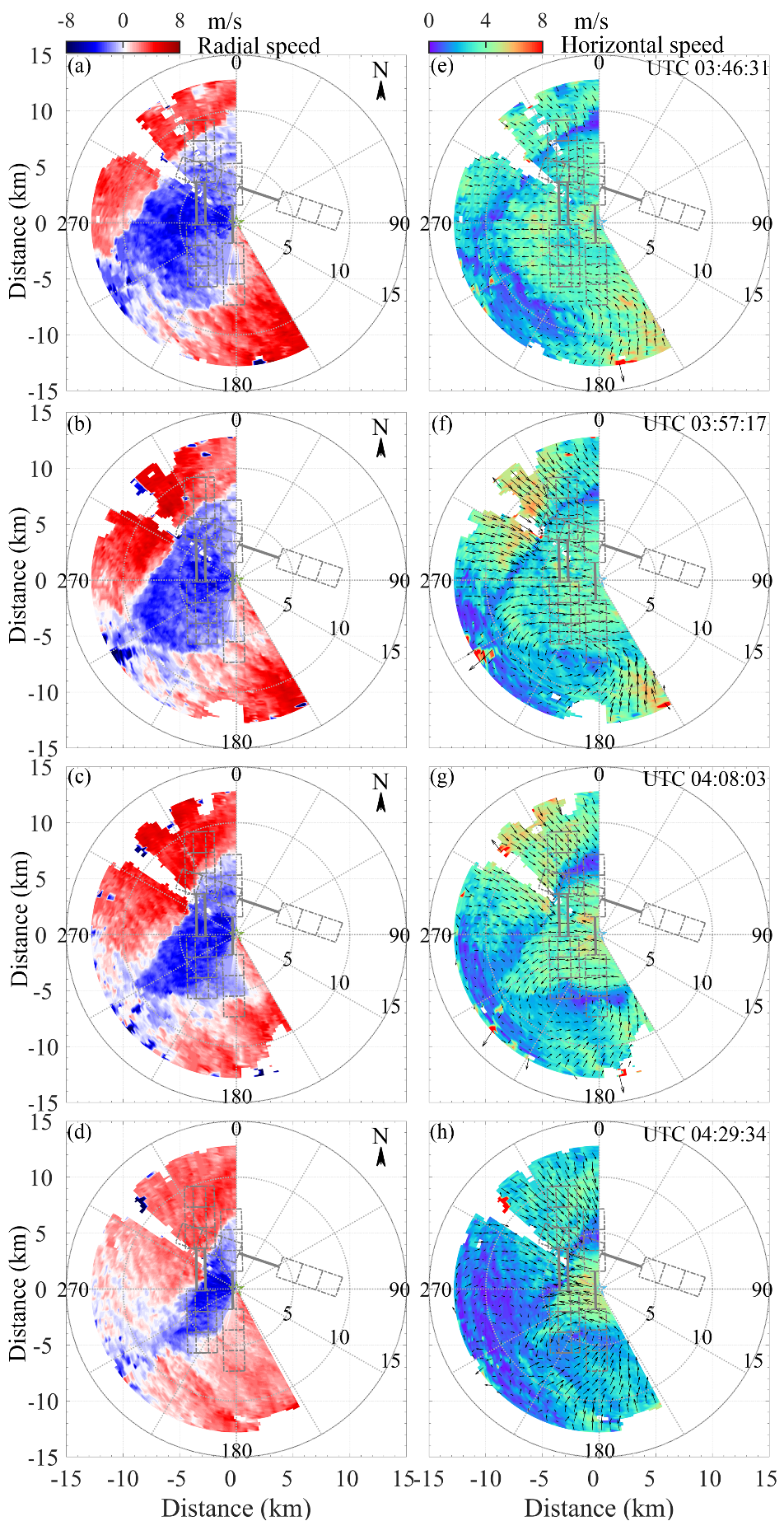
Fig. 8.The windshear event detected by the CDWL on July 1. (UTC). (a–d) Radial speed, (e–h) Horizontal speed. (a,e) 3:46:31–3:47:12, (b,f) 3:57:17–3:57:58, (c,g) 4:08:03–4:08:45, (d,h) 4:29:34–4:30:17.
